Subvision AB

The search and salvage of the Swedish DC3 airplane (lost during the cold war) in the Baltic 2003.
The retrieval of the black box from a Swedish JAS fighter airplane which crashed in lake Vänern 1999.
Numerous submarine rescue training operations. performed by the Royal Swedish Navy.
Sea floor and sub bottom surveys in the Baltic Sea and Atlantic Ocean.
ARON 2010
What is ARON 2010 ?
Aron is an abbreviation for Automatical ROv Navigation but is much more than just navigation.
Aron 2010 is a support tool for companies and organizations performing all sorts of underwater operations.
Aron helps you getting a clear picture of what happens on and below the surface.
Once installed on board it helps you to:
• Keep track on your main and underwater vessels.
• Give navigational support to helmsman during survey operations.
• Gather data from all your sensors such as GPS:s, Acoustic positioning systems, Gyros, Echo sounders, MRU:s and more.
• Handle supporting information such as navigational lines, information about found objects, vessel traces and so on.
• Calculate and output data to other systems on board.
• Log data.
• Handle a variety of different coordinate systems.
• Replay operations during evaluation.
Who needs ARON 2010?
Typical situations were Aron will help you getting the work done faster, more reliable and with excellent documentation:
• Sea floor surveys
• Sub bottom surveys
• ROV inspection
• Cable tracking and laying
• Underwater search operations
• Pipeline surveys
• Environmental surveys and operations
• Diver operations
• Marine biological work
• Harbor inspection
• Under water construction
• Vessel positioning at signature ranges
• Military underwater operations
and many more...
• Sensor data input via serial ports.
• Parses most standard NMEA messages as well as a number of special messages.
• Supports multiple vessels with custom outlines.
• Interfaces a variety of sensors:
GPS:s
Gyros ans other heading devices
Underwater positioning systems
Depth meters
MRU:s
Echo sounders
Sonars
Winches
• Handles a number of coordinate systems such as WGS84 with UTM projection, RT90, GRS80 and ED50.
• Dynamic recalculation between different coordinate systems.
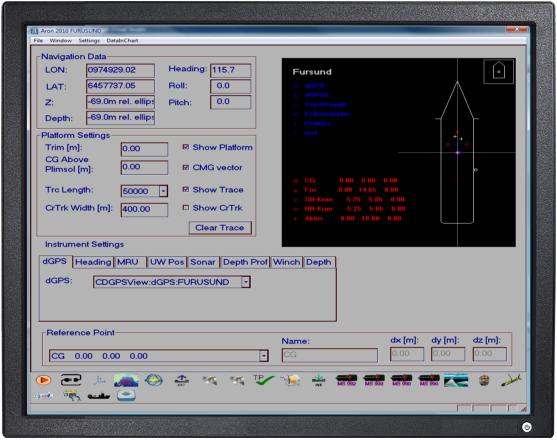
• Modularity and scalability,
it's easy to add and remove vessels and sensors and to reconfigure a vessel with a new set of sensors. Sensor position on vessel can easily be changed.
• Data base with target, line and picture data.
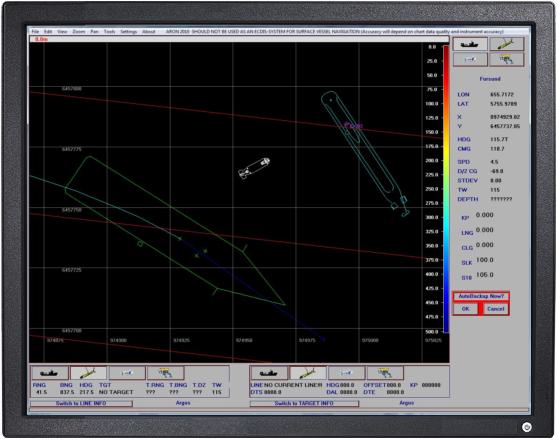
• Chart window for presentation of platforms, traces and data base objects.
• Supports vector maps in shape format and geo TIFF raster data.
• Operator configurable outputs to other systems.
• Auto backup feature gives high data integrity.
• Day and night colors.
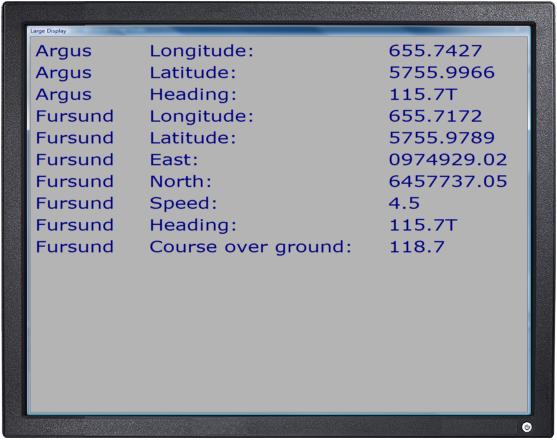
• Supports multi screen display.
• Replay of logged data.
• Runs under Windows XP, Vista and 7.
Subvision AB, Karabyvägen 543, 244 71 Dösjebro, Sweden
+46 (0)46 13 20 45, info@subvision.se